- Лабораторні роботи


Література
| Головна » Файли » Навчальний посібник » Розділ 2. АВТОМАТИЗАЦІЯ ТВАРИНИЦТВА |
| 05.01.2012, 20:35 | |
Автоматизація годування тварин Процес роздачі кормів є одним із трудомістких на
тваринницьких та птахівницьких фермах.
Технологія роздачі кормів знаходиться в тісному зв'язку з загальним
технологічним циклом, прийнятим на фермі. Головною умовою
оптимальності годування тварин є збалансованість кормів і необхідна
періодичність та дозованість їх видачі. Виходячи з цього до кормороздавальних
пристроїв пред’являються такі вимоги:
рівномірність роздачі корму в годівниці з відхиленням маси від норми з
розрахунку на одну голову не більше 10%; втрати корму не
більше 3%; тривалість роздачі
корму не більше 30 хв. для мобільних
і 20 хв. для стаціонарних
кормороздавачів; можливість регулювання норми корму від максимального до
мінімального значення. Потребу в кормороздавальних
пристроях, їх марку та кількість
визначають з урахуванням виду та віку тварин і птахів, способів їх утримання, раціонів годування,
норм видачі корму одній тварині, розрахункового поголів’я тварин. Для роздачі
корму на фермах використовують, як мобільні, обмежено-мобільні і стаціонарні кормороздавачі. Зараз одержали поширення два основних види
годівлі тварин та птахів - ненормоване і нормоване. У ненормованому випадку
кількість корму не нормується, а в другому кожній тварині та птахові в залежності від його
продуктивності і деяких інших факторів видається визначена індивідуальна
роздача корму. Найчастіше з метою спрощення технології годівлі на фермах
застосовують групове нормування, коли кормовий раціон розраховують, виходячи з
потреб середньої групи тварини чи птахів. На великих тваринницьких комплексах з
характерними для них сучасної машинної технології і потоковістю виробництва
виникає нагальна потреба застосування автоматизованих систем керування, що
дозволяють найбільше повно й ефективно використовувати устаткування, значно
знизити трудові витрати і вартість продукції, збільшити продуктивність і
поліпшити умови праці. У таких системах як правило відбувається
об'єднання декількох технологічних операцій у загальну потокову лінію з
місцевим, дистанційним та автоматизованим керуванням електроприводами машин і
механізмів. Найчастіше спільно проектуються лінії транспортування і роздачі
кормів. Системи автоматизації повинні забезпечувати послідовність автоматичного
і ручного включення машин і механізмі в порядку, зворотному напрямку руху
корму, щоб виключити завал машини, зупинку потокової лінії в заданій
послідовності у випадку аварійної зупинки однієї з машин; контроль і
сигналізацію роботи всіх машин і механізмів. Кормороздача на фермах ВРХ обумовлюється в основному раціоном
годування та способом утримання тварин. Кормороздавачі типу РВК-Ф-74,
ТВК-80, КЛО-75 відносяться до стаціонарних і призначені для роздавання всіх
видів кормів (крім концентрованих і рідких) в умовах прив’язного утримання
тварин з розподілом кормів вздовж кормового жолоба рухомою
стрічкою чи пластинчастим транспортером. Вони відрізняються між собою
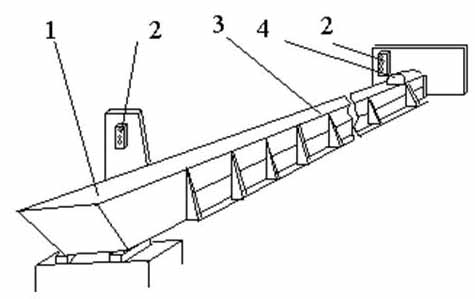
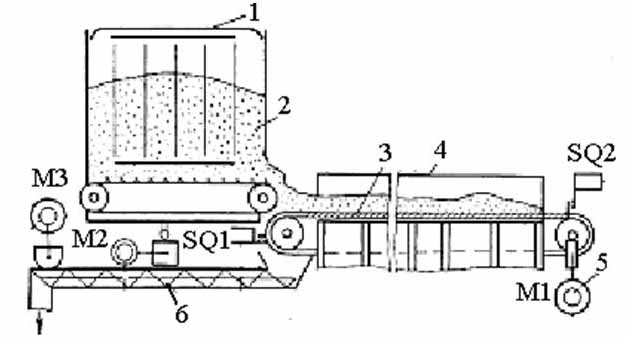
будовою розподільного транспортера та конструкцією приводної станції. Роздавач всередині годівниці РВК-Ф-74 (рисунок 2.3.1) призначений
для роздавання зелених, грубих і соковитих кормів та кормових сумішей при
утриманні корів на прив'язі. Він являє собою ряди годівниць, всередині яких
змонтовано транспортер. Транспортер-кормороздавач складається з годівниць, завантажувальний
бункер, приводної станції, стрічкового транспортера. Привод складається із рами на якій розміщено приводна. Передача крутного
моменту на ведучий вал приводу стрічкового
транспортера від приводної станції здійснюється через ланцюгову
передачу. Робочий орган, являє собою стрічку з прикріпленим до неї канатом і
круглоланковим ланцюгом.
Рисунок 2.3.1. Технологічна схема кормороздавача
РВК-Ф-74: 1 – завантажувальний бункер; 2 – кнопковий пост; 3 – годівниця; 4 –
привід. Процес роботи виконуються таким чином: мобільним роздавачем корм
завантажується в завантажувальний бункер. Приведення в рух стрічкового
транспортера забезпечує переміщення корму вздовж годівниці. При досягненні
стрічки з кормом кінця фронту кормороздачі транспортер зупиняється. Перед
початком наступної годівлі, при зворотному русі стрічкового транспортера,
виконується очищення стрічки від залишків корму, які скидаються в приямок. При
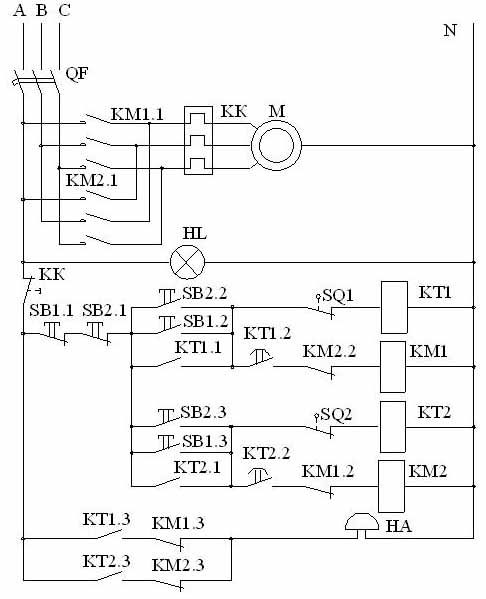
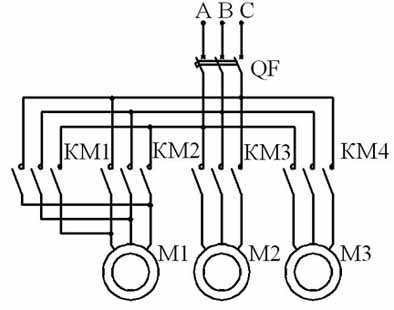
досягненні робочого органа вихідного положення привод зупиняється. Рисунок 2.3.2. Принципова
електрична схема кормороздавача РВК-Ф-74. Принципова
електрична схема кормороздавача РВК-Ф-74
зображена на рисунку 2.3.2. Ввідним апаратом щита керування кормороздавача є
автоматичний вимикач QF1, який також
забезпечує захист електродвигуна від коротких замикань. Принципова електрична
схема керування кормороздавачем передбачає управління реверсивним
електродвигуном переміщення робочого органа за допомогою кнопкових постів SB1, SB2 з двох місць в режимі роздачі
корму та видалення відходів. В схемі передбачено включення звукового сигналу HA про початок роздачі корму та видалення
відходів. Тобто кнопковим постом спочатку вмикається реле часу КТ1 чи КТ2, які забезпечують витримку часу на включення електродвигуна
переміщення після подачі звукового сигналу. Зупинка двигуна переміщення
робочого органа при роздачі корму та видалені відходів виконується автоматично
кінцевими вимикачами SQ1 та SQ2. Захист
електродвигуна від перевантажень здійснюється тепловим струмовим реле КК1. Про подачу напруги на шафу
керування сигналізує лампа HL.
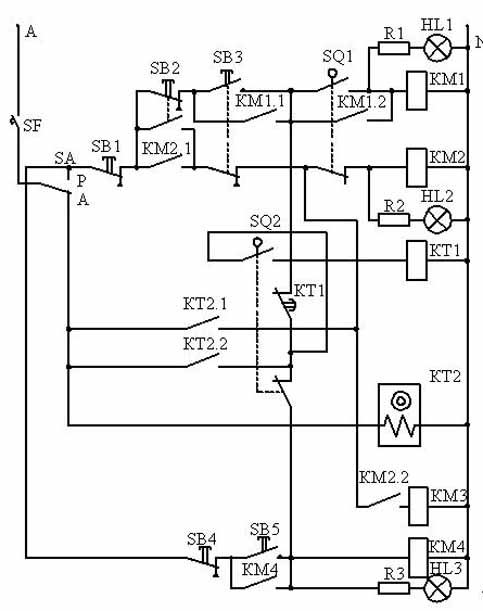
Рис. 2.3.3. Технологічна схема транспортера - кормороздавача ТВК-80Б Автоматизована потокова лінія
роздачі кормів ТВК-80Б призначена для
роздавання всіх видів кормів (крім концентрованих і рідких) в умовах
прив’язного утримання тварин. Він являє собою рухому стрічку, (рис. 2.3.3) у годівницях 4, що приводитися в
дію реверсивним електроприводом 5. При русі вперед стрічка несе до місця стійла
тварин визначене, завантажене
живильником 1 визначену кількість корму. Як живильник може бути використаний
кормороздавач КТУ-10, що має накопичувальну ємність 2. З поверненням стрічки
(реверс) годівниці самоочищаються від залишків корму, що віддаляється з
приміщення транспортером 6.
Рис. 2.3.4. Принципова електрична схема керування
кормороздавачем ТВК-80Б. Таким
чином, ТВК-80Б здатний транспортувати корму до місця споживання і забирати їхні
відходи, тобто виконувати найбільш трудомісткі технологічні операції. Але
нормовану годівлю на ТВК-80Б здійснити неможливо, оскільки корм при русі
стрічки самовільно розрівнюється. Крім того, при русі стрічки тварини вибірково
поїдають корм. Технологічна
лінія роздачі корму з кормороздавачем ТВК-80Б і стаціонарним роздавальником
КТУ-10 може функціонувати в автоматичному режимі. Для роздачі кормів протягом
доби використовують добове програмне реле КТ2 типи 2РВМ чи аналогічне,
котре встановлюють відповідно до розрахункової діаграми годівлі,
кормороздавальною лінією, відповідно до принципової електричної схеми (рис.
2.3.4), керують вручну або автоматично в
наступному порядку. Спочатку контактом програмного пристрою КТ2:1
вмикаються магнітні пускачі КМ2 і КМЗ повернення стрічки транспортера відходів. У кінцевому переднім
положенні стрічки кормороздавача кінцевий вимикач SQ1 зупиняє її рух і
відключає транспортер відходів через контакт КМ2:2. По команді
програмного реле контактами КТ2:2 вмикається привод живильника КМ4
і привод роздачі корму КМ1. Наприкінці роздачі кінцевий вимикач SQ2
вимикає КМ4 з витримкою часу КМ1. Автоматична ідентифікація тварин
при індивідуальній годівлі. Особливість розглянутих в цьому
розділі пристроїв — їх непридатність для індивідуальної роздачі кормів. В той
же час індивідуальна роздача кормів, особливо концентрованих, має великі
переваги, такі, як економна витрата корму і збільшення продуктивності тварин на
10....15 %. Найбільш поширена індивідуальна роздача кормів на доїльному
майданчику. Існують також системи роздачі
кормів в корівниках з використанням спеціальних автоматичних кормових станцій.
Управління цими системами може бути ручне, програмне або автоматичне. Системи
дозування кормів в місцях утримання тварин рекомендуються для
високопродуктивних корів. За допомогою автоматичної кормової станції можна
організувати видачу концентрованих кормів невеликими дозами протягом доби, коли
тварина саме підходить до годівниці (кормової станції). Очевидно, індивідуальна роздача
кормів вимагає виконання ряду умов: ідентифікація тварини, вимірювання його
продуктивності і наявність керованого дозуючого пристрою.
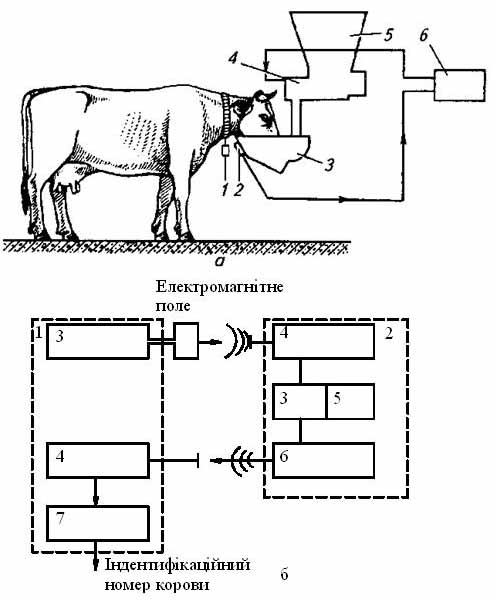
Рисунок 2.3.5. Автоматизована система індивідуального
годування ВРХ: а — технологічна схема системи: 1 — передавач; 2— приймально-передаючий
пристрій; .3—кормушка; 4 — дозатор; 5 — бункер; 6— мікроЕОМ; б — функціональна
схема: 1 — ідентифікуючий пристрій; 2—транспортер; 3 — генератор
електромагнітних хвиль; 4—приймальний пристрій; 5— блок пам'яті; б—передаючий
пристрій; 7—декодуючий пристрій Автоматичну ідентифікацію тварин
здійснюють за допомогою радіотехнічного пристрою — датчика, закріплюваного у
вусі або на спеціальному ошийнику (рис. 2.3.5, а). Найвдалішою конструкцією
такого датчика є передавач, об'єднуючий в одному корпусі приймальний і
передаючий пристрої (рис. 3.2.5.6). Живлення схеми передавача здійснюється
через приймальну феритову антену від генератора, що входить до складу
ідентифікуючого пристрою. Передаючий пристрій виробляє послідовність імпульсів
відповідно до індивідуального коду, закладеного в пам'яті передавача. Цей
сигнал випромінюється передаючим пристроєм на фіксованій частоті, приймається
ідентифікуючим пристроєм, декодується і використовується управляючим пристроєм
системи автоматичного годування як ідентифікатор тварини. | |
| Категорія: Розділ 2. АВТОМАТИЗАЦІЯ ТВАРИНИЦТВА | Додав: Лідер | Теги: | |
| Переглядів: 6436 | Завантажень: 0 | |

волог.: 83%
тиск: 740 мм
вітер: 4 м/с,
волог.: 67%
тиск: 741 мм
вітер: 3 м/с,
волог.: 88%
тиск: 731 мм
вітер: 2 м/с,
волог.: 71%
тиск: 736 мм
вітер: 2 м/с,
волог.: 61%
тиск: 740 мм
вітер: 1 м/с,


Где заказать схему планировочной организации земельного участка
|
Дисплеи и сенсорные стекла для Alcatel на partsoutlet.ru
|
Каковы преимущества автоматической системы полива?
|
Как выбрать светодиодную ленту?
|
 Очень часто люди, которые хотят иметь частное жилье, оборудуют дом и землю в соответствии со своим вкусом и потребностями. Как правило, все это делается добровольно, без согласия соответствующих органов.
Очень часто люди, которые хотят иметь частное жилье, оборудуют дом и землю в соответствии со своим вкусом и потребностями. Как правило, все это делается добровольно, без согласия соответствующих органов.  В случае выхода из строя, покупатели легко могут найти идеальный сенсорный
В случае выхода из строя, покупатели легко могут найти идеальный сенсорный 

Мой ребенок - будущий миллионер. Правдина Наталия  Книга посвящена воспитанию ребенка с Новым мировоззрением, с сердцем, открытым миру, с сознанием, стремящимся к бесконечному совершенствованию и миллионам возможностей. Основная мысль автора в том, что, развиваясь вместе с ребенком, совершенствуя себя, вы делаете свое дитя счастливым. Книга посвящена воспитанию ребенка с Новым мировоззрением, с сердцем, открытым миру, с сознанием, стремящимся к бесконечному совершенствованию и миллионам возможностей. Основная мысль автора в том, что, развиваясь вместе с ребенком, совершенствуя себя, вы делаете свое дитя счастливым. |
Секреты питания. Мишель Монтиньяка
|
 Курс «Омоложение» для Вас! Бесплатно
Курс «Омоложение» для Вас! Бесплатно Эта книга сразу стала бестселлером, прославив своего автора - Мишеля Монтиньяка, сумевшего вывести новую формулу диетологии. Если Вы, как и большинство других людей, считаете, что полнота - результат переедания, Вы глубоко ошибаетесь. Главное - это как есть и что есть: система и качество.
Эта книга сразу стала бестселлером, прославив своего автора - Мишеля Монтиньяка, сумевшего вывести новую формулу диетологии. Если Вы, как и большинство других людей, считаете, что полнота - результат переедания, Вы глубоко ошибаетесь. Главное - это как есть и что есть: система и качество.