- Лабораторні роботи
Література
| Головна » Файли » Навчальний посібник » Розділ 2. АВТОМАТИЗАЦІЯ ТВАРИНИЦТВА |
| 05.01.2012, 20:49 | |
Автоматизація годування птиці Кормороздача в птахівництві в значній мірі залежить від способів утримання птахів. Розглядають такі способи вирощування та утримання птиці:
підлоговий, клітковий та
комбінований. При підлоговому утриманні птахи утримуються на підлозі пташника з можливим вигулом або без нього. При такому утриманні значні затрати праці і обмежена
концентрація поголів'я. Безвигульне
підлогове вирощування та утримання птахів передбачає використання глибокої підстилки на планчастій або сітчастій підлозі; добру вентиляцію,
оптимальний світловий режим. При цьому підвищується рівень механізації та автоматизації виробничих процесів,
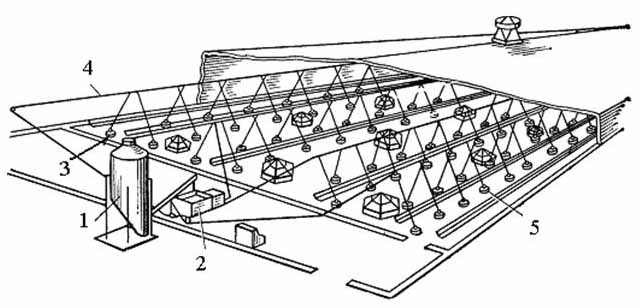
поліпшується продуктивність, зростає економічна ефективність виробництва. На рисунку 2.3.11
показано технологічну лінію роздачі
кормів при безвигульному підлоговому утриманні птахів. Така технологія
характерна при використанні тросово-шайбових та спіральних транспортерів
кормороздачі.
Рисунок 2.3.11. Технологічна
лінія роздачі кормів при безвигульному підлоговому утриманні птахів: 1 – бункер
для зберігання кормів БСК; 2 – бункер
дозатор; 3, 5 – годівниці; 4 – кормопровід. При клітковому утриманні птахів
розміщують у кліткових батареях, які складаються з кількох ярусів кліток. У кожну клітку вміщують по 3-10 курей або 10-60 курчат. Розташування курей малими групами зменшує
стресові ситуації при формуванні груп, полегшує спостереження за ними.
Відносно обмежений рух курей у клітках призводить
до зменшення затрат корму порівняно з
підлоговим утриманням при такій же продуктивності. При клітковому утриманні збільшуються
витрати металу, але
відпадає потреба в підстилці і в 3-4
рази збільшується поголів'я на одиниці площі.
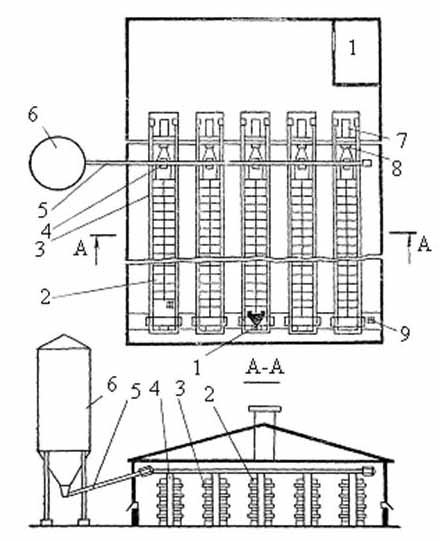
Рисунок 2.3.12. Обладнання
роздачі кормів в кліткових батареях з ланцюговим транспортером в середині
жолобкової годівниці: 1 – установка для поздовжнього прибирання посліду; 2 –
кліткова секція; 3 – жолобкова годівниця з ланцюговим транспортером; 4 –
бункери-дозатори кліткової батареї; 5 – транспортер шнековий; 6 – бункер
зберігання сухих кормів; 7 – елеватор для яєць; 8 – зрівнювальний бачок; 9 –
установка для поперечного видалення посліду.
Комбіноване вирощування полягає в тому, що курчата до 1,5-2
- місячного віку утримуються в клітках з обігрівом, а потім їх переводять на
підлогове утримання в легких приміщеннях, що не опалюються. Такий спосіб застосовують на невеликих птахофабриках. При аналізі рівнів механізації та автоматизації при різних способах утримання
птахів слід відмітити, що при утриманні в кліткових батареях вони найбільші. У
батареях передбачається автоматизоване керування фактично повним комплексом
технологічних процесів і операцій: роздавання корму, напування птахів,
видалення посліду, збирання яєць, підтримання оптимальних параметрів мікроклімату. Для годівлі птахів застосовують збалансовані по вмісту
живильних речовин гранульовані або розсипні комбікорми. Пташники, як правило,
комплектують одновіковою і рівнозначною по продуктивних властивостях групою птахів.
Для годівлі птахів застосовують жолобкові годівниці і бункерні автогодівниці
різної конструкції. Обладнання роздачі корму при
утриманні в кліткових батареях складається: з зовнішнього
бункера 6 зберігання та видачі сухих кормів; розподільного транспортера
5 подачі кормів від зовнішнього
бункера в бункери-дозатори 4 рядів батарей; засобів розподілу корму в
жолобкові годівниці. В якості засобів розподілу корму в жолобкові годівниці для даного варіанту
кормороздачі є ланцюгові транспортери 10. При цьому корм з нерухомих бункерів-дозаторів
подається на ланцюговий транспортер, що переміщується всередині годівниці.
Автоматизація кормороздачі в даному випадку зводиться до програмного керування
періодичністю видачі кормів, контролю рівня корму в бункерах дозаторах та
керування розподілом кормів в жолобкових годівницях. Автоматизація лінії кормороздачі комплекту обладнання БКМ-3. Комплект обладнання БКМ-3 призначений для кліткового утримання молодняку
курей-несучок. Технологічний процес роздачі корму виконується таким чином. Корм
з бункера 1 подається похилим
транспортером 5 до приймального
горизонтального транспортера 4, який
доставляє корм у бункери кліткових батарей, завантажуючи їх послідовно. Після
того як корм повністю заповнить бункер першої батареї і закриє вивантажувальне
вікно в коробі вивантажувального транспортера, він починає транспортуватися до
бункера другої батареї і завантажувати його аналогічно попередньому. При
заповненні останнього бункера лінія завантаження корму автоматично вимикається.
Приводи кормороздавальних ланцюгів вмикаються вручну кнопками або автоматично
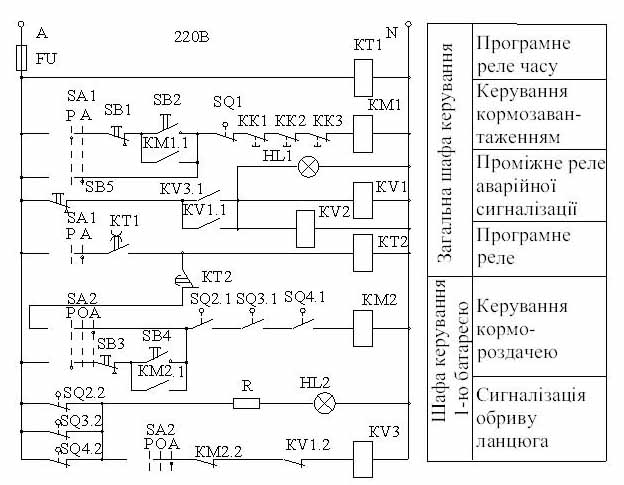
за командою програмного пристрою. Принципова
електрична схема керування завантаження бункерів кліткових батарей БКМ-3 і кормороздачею першої батареї наведено на рисунку 2.3.13.
Схеми керування кормороздачею у всіх інших батареях аналогічні першій. Апарати
лінії кормозавантаження (КТ1, КМ1, KV2,
КТ2, HL1) знаходяться в загальному ящику керування. Апарати керування
лінією кормороздачі (для першої батареї —
КМ2, KV3, HL2) розміщені в ящику керування відповідної батареї. У коло
керування пускачем КМ1, який вмикає і
вимикає всі електродвигуни лінії завантаження кормів, увімкнені контакти
теплових реле КК1 – КК3
електродвигунів похилого і горизонтального транспортерів. Для
роботи в ручному режимі перемикачі SA1
і SA2 ставлять у положення "Р". Транспортери
кормозавантаження вмикають кнопкою SB2.
Вимикається двигун транспортера після заповнення бункера останньої батареї
кінцевим вимикачем SQ1 або
натисканням кнопки SB1. Двигун
кормороздачі першої батареї вмикається і вимикається натисканням кнопок SB3 і
SB4. При
обриві ланцюга кормороздавача двигун його привода вимикається контактами
вимикачів обриву ланцюга SQ2.1 - SQ4.1,
а контактами SQ2.2 - SQ4..2 вмикаються сигнальні лампи в ящику керування
батареєю та в залі.
Рисунок 2.3.13. Принципова електрична схема кормороздачі обладнання БКМ-3. В
автоматичному режимі перемикачі SA1 і
SA2
ставлять у положення "А".
Механізми кормозавантаження вмикаються і вимикаються контактом кінцевого
вимикача SQ1, що розміщений на
бункері останньої кліткової батареї. При його заповненні подається команда на
зупинку двигунів транспортерів. Команди
на вмикання транспортерів кормороздавачів подаються від програмного пристрою КТ1, відповідно до технологічних режимів
годівлі. При замиканні контакту КТ1
через розмикаючий контакт КТ2 другого
реле часу відбувається автоматичний запуск двигунів кормороздавачів всіх
кліткових батарей. Витримка часу реле КТ2
дорівнює тривалості кормороздачі батареї. У
випадку обриву ланцюга кормороздавача на будь-якому ярусі кліткової батареї
перемикаються контакти одного з кінцевих вимикачів SQ2 - SQ4. При цьому вимикається електромагнітний пускач
ланцюгового транспортера КМ2, а реле KV3 - вмикається. Контакт KV3.1 замикає коло обмоток реле KV1 і
KV2, які своїми контактами вмикають сигнальну лампу HL1 в залі та лампу сигналізації батарей (на схемі не показана).
Для зняття сигналу в залі перемикач SA2
ставлять у положення "О" і
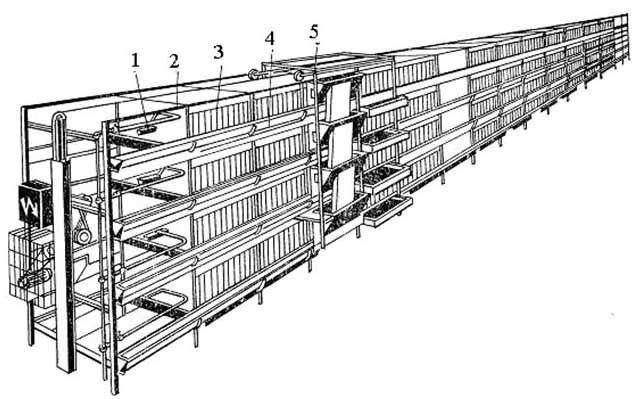
натискають кнопку SB5. Автоматизація лінії кормороздачі комплектом обладнання
КБН.
Рисунок 2.3.14. Кліткова батарея КБН для утримання курей-несучок: 1- напувалки; 2 –
каркас: 3 – клітка; 4 – годівниця; 5 – кормороздавач. Зовнішній вигляд багатоярусних кліткових батарей типу КБН
наведено на рисунку 2.3.14. Як і в попередньому варіанті сухий корм до
пташників підвозять спеціальним автокормовозом-завантажувачем і заповнюють
бункер типу БСК-10 для зберігання сухих кормів. Похилим шнековим транспортером
і горизонтальним поперечним транспортером
корм подається до приймальних бункерів навісних кормороздавачів
двобічної дії. На відміну від попередніх (стаціонарних бункерів-дозаторів),
наповнені навісні бункери-дозатори переміщуються вздовж кліткової батареї і
вивантажують корм у жолобкову годівницю. Одночасно з кормороздачею здійснюється
прибирання посліду під кожним ярусом кліткової батареї.
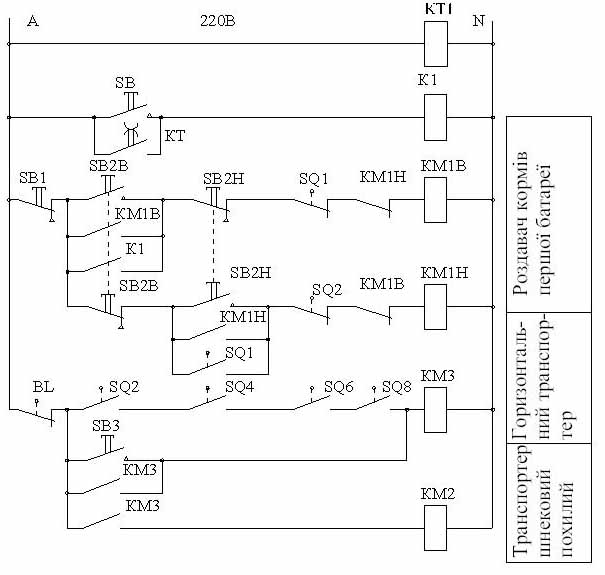
Рисунок 2.3.15. Принципова електрична схема керування електроприводом роздавання корму на птахофермах з комплектом обладнання КБН. Рухомі
бункери-дозатори кормороздачі та скребки для видалення посліду приводяться у
дію від електродвигуна M1 потужністю 0,6 кВт через редуктор та систему
передач. При
зворотному русі роздавача корм продовжує заповнювати годівниці, а скребки для
видалення посліду здійснюють холостий хід. У кінці пташника встановлено
транспортер який видаляє послід за межі будівлі з одночасним завантаженням у
транспортні засоби. Принципова
схема керування роздаванням корму і прибирання посліду (рисунок 2.3.15) може
працювати у "Ручному" та "Автоматичному" режимах. У "Ручному" режимі керування
електродвигунами M1, M2, М3
відбувається за допомогою відповідних кнопок "Пуск" та "Стоп"
(SB1, SB2B, SB2H, SB3). При "Автоматичному" керуванні
вмикання роздавача здійснюється програмним реле часу КТ. У вихідному положенні кормороздавачів контакти кінцевих
вимикачів SQ4, SQ5, SQ6, SQ7 будуть
замкнені. Якщо приймальні бункери-дозатори останнього роздавача не заповнені
кормом, то контакти фотореле BL замкнені і котушка магнітного пускача КМ3 одержує живлення та вмикає двигун М3 горизонтального скребкового
транспортера. Одночасно замикаючі контакти КМ3
подають напругу на котушку пускача КМ2,
який вмикає двигун M2 привода похилого шнекового транспортера. При роботі
завантажувальної лінії йде почергове заповнення бункерів кормороздавачів,
починаючи з першого. Після заповнення останнього бункера розмикаються контакти фотореле BL і двигуни M2 та М3 заповнення бункерів дозаторів зупиняються. У
визначений час контакти програмного реле часу КТ замикаються, вмикається проміжне реле К1. Замикаючі контакти К1
подають напругу на котушку магнітних пускачів КМ1В (КМ2В, КМЗВ, КМ4В),
які вмикають електродвигуни М1А (М1Б, М1В, М1Г) навісних роздавачів, і
всі роздавачі починають переміщуватися вздовж пташника і роздавати корм. На
принциповій електричній схемі показано лише кола керування електродвигуна M1 кормороздавача А (КМ1В). Аналогічно йде керування роздавачами Б, В, Г. Одночасно
з роздаванням корму йде прибирання посліду. Коли роздавач доходить до кінця
приміщення, упори скребків четвертих ярусів натискають на кінцеві вимикачі SQ1, SQ3, SQ5, SQ7 і привід
реверсується. При
зворотному русі роздавання кормів у годівниці триває. У вихідному положенні
упори скребків третього ярусу натискають на кінцеві вимикачі SQ2, SQ4, SQ6, SQ8, кормороздавачі
вимикаються для підготовки до наступного завантаження кормами. | |
| Категорія: Розділ 2. АВТОМАТИЗАЦІЯ ТВАРИНИЦТВА | Додав: Лідер | Теги: | |
| Переглядів: 6852 | Завантажень: 0 | |

волог.:
тиск:
вітер:
волог.:
тиск:
вітер:
волог.:
тиск:
вітер:
волог.:
тиск:
вітер:
волог.:
тиск:
вітер:


