- Лабораторні роботи
Література
| Головна » Файли » Навчальний посібник » Розділ 1. ОСНОВИ АВТОМАТИЗАЦІЇ СІЛЬСЬКОГОСПОДАРСЬКОГО ВИРОБНИЦТВА |
| 04.02.2012, 16:06 | ||||||||||||||||||||||||||||||||||
ВИБІР АЛГОРИТМУ УПРАВЛІННЯ ОБ'ЄКТОМ Динамічні властивості об'єктів управління дають змогу розробникам систем автоматики на стадії проектування визначити алгоритм управління. Для цього слід проаналізувати співвідношення між постійною часу та часом запізнювання. Відомо, що
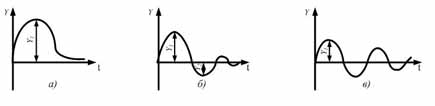
При визначенні алгоритму управління необхідно пам'ятати, що структура передаточної функції повинна відповідати виразам для статичного і астатичного об’єкту. Метод інтегральних площин дає більш складну структуру. У цьому випадку: за передаточною функцією знаходять оригінал, за яким будують криву розгону; крива розгону (побудована) апроксимується графічним способом, яких би динамічних властивостей не мали зазначені об'єкти; розраховані параметри передаточної функції використовуються для визначення алгоритму управління. Лінійний алгоритм управління — один із найпоширеніших у сільськогосподарському виробництві. Він поєднує пропорційний, інтегральний, пропорційно-інтегральний, пропорційно-диференційований, пропорційно-інтегрально-диференційований. Кожний з них має свої недоліки і а переваги. У практиці проектування для конкретного об'єкту вибирають такий алгоритм, який би забезпечив один із трьох типових перехідних процесів: аперіодичний, з 20 % перерегулюванням та з мінімальним інтегральним показником якості (рис. 1.23). Аперіодичний характеризується максимальним динамічним відхиленням, мінімальним часом регулювання та відсутністю перерегулювання. Перехідний процес з 20 % перегулюванням середній по якості. Перехідний процес з мінімальним інтегральним показником якості (площа між кривою перехідного процесу та віссю часу мінімальна) характеризується значним перерегулюванням, найбільшим часом регулювання та мінімальним динамічним відхиленням. Конкретний типовий перехідний процес може бути визначений з урахуванням вимог технологів до відповідного об'єкту управління. Методика вибору найкращого алгоритму управління полягає у визначенні динамічного коефіцієнта регулювання. Для статичних об'єктів:
де у1 – максимальне динамічне відхилення; kо – коефіцієнт передачі об'єкта управління; ум – максимально можливе збурення по навантаженню (у відсотках переміщення регулюючого органу).
Рис. 1.23. Типові перехідні процеси: а – аперіодичний; б – із 20 %- ним перерегулюванням; в – із мінімальним інтегральним показником якості Після цього за графічними залежностями визначають алгоритм управління. Для астатичних об'єктів:
де εо — швидкість розгону об'єкта; τ — час запізнювання. Для астатичного об'єкта алгоритм управління знаходять за табл. 1.18. Динамічні коефіцієнти регулювання для астатичних об’єктів
Для того, щоб переконатись у правильності вибору алгоритму управління, розраховують час регулювання, який потім порівнюють із вимогами технологів: tр = τφ, де φ— відносний час регулювання, що вибирається за табл. 1.19. Позиційний алгоритм управління — найдешевший, але придатний лише для низькочастотних об'єктів, тобто для тих, що пропускають тільки першу гармоніку. На відміну від лінійних алгоритмів позиційний потребує для розрахунків параметрів настройки регуляторів не метод синтезу, а метод аналізу. Широке застосування при цьому отримав метод Гольдфарба, в основі якого лежить метод гармонічної лінеаризації. Застосування методу гармонічної лінеаризації передбачає деяку нелінійну ланку, що входить до складу системи автоматизації, замінити лінійною, властивості якої характеризуються коефіцієнтами гармонічної лінеаризації:
де g1, g2 – коефіцієнт гармонічної лінеаризації. Розрахунок параметрів настройки полягає в тому, що розробники задаються деякою зоною нечутливості і розраховують параметри автоколивань, що виникають в системі. Якщо вони відповідають вимогам технологів, то розрахунки на цьому завершують. Якщо ж ні, то беруть інші значення зони нечутливості і так доти, доки не отримують задовільний результат. Таблиця 1.19 Відносний час регулювання
| ||||||||||||||||||||||||||||||||||
| Категорія: Розділ 1. ОСНОВИ АВТОМАТИЗАЦІЇ СІЛЬСЬКОГОСПОДАРСЬКОГО ВИРОБНИЦТВА | Додав: Лідер | ||||||||||||||||||||||||||||||||||
| Переглядів: 1749 | Завантажень: 0 | ||||||||||||||||||||||||||||||||||



волог.:
тиск:
вітер:
волог.:
тиск:
вітер:
волог.:
тиск:
вітер:
волог.:
тиск:
вітер:
волог.:
тиск:
вітер:


