Тема: Дослідження схем автоматизації установки для роздачі кормів
Призначення установки для роздачі кормів
Тросово-шайбові кормороздавачі використовують для нормованої годівлі сухими комбікормами в тваринницьких і птахівничих приміщеннях. Згідно з функціональною схемою автоматизації (рисунок 2.3.10) управління роздачею кормів здійснюється так. З бункера добової норми видачі корму БСК 1, що знаходиться поза тваринницьким приміщенням, шнековим транспортером комбікорм подається на проміжний бункер 2, що знаходиться в приміщенні.
Будова установки для роздачі кормів
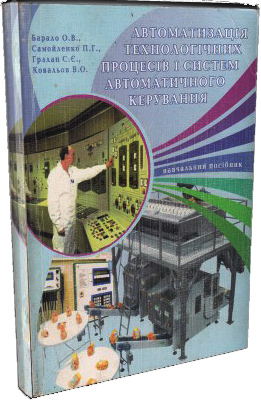
Кормороздавач складається з тросошайбового кармороздавача 10, бункера сухих кормів БСК, в якому знаходяться датчики рівня 1, 2, натяжного пристрою 5 (рис. 1), електродвигуна 4 з редуктором 3, годівниць 8 з дозаторами 9 (рис. 1).

Рисунок 1. Технологічна схема тросошайбового кормороздавача:
1. датчики рівня в бункері (повний і допустимий рівень); 2 – датчик нижнього рівня; 3 – редуктор; 4 – електродвигун; 5 – натяжний пристрій; 6 – кінцевий вимикач; 7 – датчик рівня в годівниці; 8 – годівниця; 9 – дозатор годівниці; 10 – тросошайбовий кормороздавач.
Технологічна робота установки для роздачі кормів
Згідно з технологічною схемою автоматизації (рисунок 1) управління роздачею кормів здійснюється так. З бункера БСК 1, що знаходиться поза тваринницьким приміщенням, корм переміщується по кормопроводу тросово-шайбовим транспортером 10. Через отвори в кормопроводі комбікорм просипається в індивідуальні (групові) дозатори 9. В останньому індивідуальному дозаторі встановлено датчик рівня 7. Видача корму виконується по команді від програмного пристрою в установлений час, шляхом ввімкнення електродвигуна 4 приводу кормороздавача. Контроль рівня кормів в бункері контролюється за допомогою датчиків рівня 1,2, а наявність корму в дозаторі останньої годівниці датчиком 7. Натяг тросу кормороздавача контролюється кінцевим вимикачем 6.
Робота принципової електричної схеми установки для роздачі кормів

Рисунок 2. Принципова електрична схема тросошайбового кормороздавача
Принципова електрична схема тросошайбового кормороздавача для роздачі комбікормів показана на рисунку 2.
Робота кормороздавача передбачена в двох режимах, ручному і автоматичному. Режими задаються перемикачем SА.
В ручному режимі перемикач встановлюємо в положення «Р». Вмикання електродвигуна кормороздавача здійснюємо за допомогою кнопки SВ1.2., при натисканні якої подається напруга на котушку магнітного пускача КМ, який силовими контактами вмикає подає напругу на електродвигун, а додатковими контактами КМ1 блокує кнопку SВ1.2. Сигналізація роботи електродвигуна здійснюється за допомогою лампочки НL1.
Вимикання електродвигуна кормороздавача в ручному режимі здійснюється кнопкою SВ1.1.
В автоматичному режимі перемикач SА встановлюємо в положення «А». В цьому положенні перемикача отримає живлення котушка програмного реле часу КТ, яке своїми контактами КТ1 подає живлення на котушку магнітного пускача КМ електродвигуна кормороздавача М. При заповненні кормом останньої годівниці спрацьовує контактний датчик рівня SL1, який подає напругу на котушку проміжного реле КV1. Контакти реле КV1.1. розмикаються в колі котушки КМ, що призводить до вимикання магнітного пускача і електродвигуна кормороздавача М.
При закінчені кормів в бункері контактний датчик рівня SL2 подає напругу на котушку проміжного реле КV2, яке своїми контактами КV2.1 вимикає магнітний пускач і електродвигун кормороздавача М. Контакти реле КV2.2. подають напругу на дзвоник НА, для повідомлення персоналу про відсутність кормів в бункері. Контакти реле КV2.3 подають напругу на сигнальну лампу НL2, яка сигналізує про закінчення кормів в бункері.
Контактний датчик рівня SL3 подає напругу на котушку проміжного реле КV3, який своїми контактами вмикає сигнальну лампу НL3. Вона сигналізує про достатній рівень корму в бункері для добової годівлі тварин.
Про заповнений бункер кормом здійснює сигналізацію контактний датчик рівня SL4, який за допомогою проміжного реле КV4 вмикає сигнальну лампу HL4.
Кінцевий вимикач SQ контролює натяг тросу кормороздавача. При ослаблені або обриві контакти SQ розмикаються, магнітний пускач КМ вимикається і вимикається електродвигун приводу кормороздавача М.
Призначення, загальна будова та принцип роботи датчика рівня СУМ-1
Датчик сипучих матеріалів СУМ-1 призначається для контролю і автоматизації рівня зерна та подібних сипучих продуктів.

Рисунок 3. Загальний вигляд датчика рівня СУМ-1
Основна конструкція СУМ-1 виконана з міцного пластику, усередині корпусу вбудовані панель з пружиною для регулювання, мікроперемикач і контактна планка. Також всередині закріплена робоча мембрана, виготовлена з гуми, і тарілка мембрани. Зверху корпуса датчика розташована запобіжна кришка з компенсаційною мембраною.
В процесі роботи сипучий продукт починає тиснути через робочу мембрану на пружину і мікроперемикач, який спрацьовує і починає передавати сигнал в основний ланцюг сигналізації і управління. При цьому, не дивлячись на переміщення мембрани, тиск в датчику СУМ-1 буде незмінним, завдяки передбаченій в конструкції компенсаційної мембрані. Підключається датчик в звичайну мережу 220 вольт, абсолютно не вимагає для роботи додаткових стабілізуючих пристроїв або блоків живлення.
Технічні характеристики
|
Параметри
|
Норма
|
|
Напруга змінного струму, В
|
220
|
|
Струм, А
|
2
|
|
Частота струму, Гц
|
50
|
|
Зусилля спрацювання, Н
|
0,5±20%
|
|
Імовірність безвідмовної роботи за 2000 годин напрацювання, не менше
|
0,94
|
|
Встановлена безвідмовна напрацювання, циклів, не менше
|
30000
|
|
Середній термін служби, років
|
10
|
|
Маса, кг, не більше
|
0,45
|
|
Виконання за ступенем захисту оболонкою
|
IP 65
|
Експлуатується в виробничому приміщенні, або знаходиться під будь-яким навісом, де різниця між коливаннями тeмператури, а також влaжності вoздуха на відкритому повітрі і приміщенні не істотні. Для роботи датчика СУМ-1 важливий вільний доступ повітря зовні, і відсутність попадання прямих сонячних променів і різних кліматичних опадів.
. 
Рисунок 4. Схема габаритних розмірів датчика СУМ-1
Призначення кінцевого вимикача
Кінцевий вимикач призначений для управління рухомими механізмами електротехнічних пристроїв згідно алгоритму та комутації електричних ланцюгів управління змінної і постійної напруги. Також він використовуються під час контролю і керування технікою, яка повинна регулярно перевірятися на рухливість. Кінцевий вимикач встановлюється на конструкції, де потрібно контролювання рухів окремих елементів
Будова кінцевого вимикача
Рисунок 5. Будова кінцевого вимикача.
1 - контактна планка; 2 - - нерухомий контакт; 3 - направляючий шток; 4 - рухливий контакт; 5 – пружина; 6 – головка штока; 7 – корпус; 8 – кришка.
Кінцевий вимикач складається з корпуса, верхньої кришки, головки та рухомих і нерухомих контактів.

Рисунок 6. Моделі кінцевих (шляхових ) вимикачів
Принцип роботи кінцевого вимикача
Шляховий вимикач, це комутаційний пристрій , який сприймає механічне зусилля переміщення діючого пристрою для спрацювання електричних контактів. Вимикач кріпиться так, щоб головка штока 6 або ролик (в залежності від моделі) сприймав зусилля більше за протидію вбудованої пружини 5, що в результаті призводить до переміщення рухомих контактів 4 відносно нерухомих 2. В першу чергу здійснюється розмикання нормально замкнених контактів. Це необхідно для того, щоб розірвати електричне коло, по якому проходить напруга живлення до навантаження (котушки магнітного пускача), а потім з дуже малою витримкою, долі секунд, замикаються нормально розімкнені контакти. В результаті подається напруга на навантаження (наприклад, котушка другого магнітного пускача). По закінченні дії зусилля на шток 6, рухомі контакти 4 повертаються в початкове положення, відповідно розмикається нормально розімкнений контакт і замикається нормально замкнений контакт.
Призначення реле часу 2РВМ
2РВМ призначене для автоматичного управління двома незалежними електричними ланцюгами шляхом замикання і розмикання цих ланцюгів повторюваним добовими програмами
Будова реле часу 2РВМ

Рисунок 7. Будова реле часу РВМ:
1 – кришка; 2 - програмний диск; 3 – електроконтактні пластини; 4 – корпус; 5 – клемна колодка; 6 – годинниковий механізм з мікродвигуном; 7 – з’єднувальні провода; 8 – штифти програми.
Програмні реле часу 2РВМ являє собою електромеханічний прилад, що складається з анкерного годинникового механізму з автоматичним заводом пружини від мікроелектродвигуна, програмного диска, трьох мікроперемикачів.
Принцип роботи реле часу
Принцип дії реле полягає в тому, що годинниковий механізм обертає програмний диск з швидкістю один оберт на добу. На диску є два концентричних ряди різьбових отворів, в які загвинчують установочні гвинти (штифти) за заданими двома програмами. Штифти за допомогою системи важелів здійснюють вмикання і вимикання двох мікроперемикачів на кожній з програм. Мікроперемикачі ввімкнені в кола котушок проміжних реле. Для виконання одного циклу вмикання і вимикання струмоприймачів потрібно встановити на потрібний час два штифти, один з яких здійснює вмикання, а другий — вимикання. Реле 2РВМ призначене для роботи від змінного струму напругою 220 В.
|